开云kaiyun官方网站 小米SU7取消侧向激光雷达, 雷军与马斯克又料到一块去了?

在智能驾驶领域,感知硬件动作集结行车周围说念路气象、拒绝物分类使命的主要部件组,其部件散布花样与类型的改变皆意味着某款车型在感知算法、算力方面产生了大改。正如当今大部分车企将高阶智能驾驶有预备从三激光雷达减少至单激光雷达,在硬件减少的前提下需要用算法进行感知补全。在如今智能驾驶启动追求性价比的期间,减少多激光雷达带来的性能冗余依然成为主流。
在近期谍照中,小米SU7取消了在原来路试时设立的两颗侧向激光雷达,通过录像头有预备代替补盲激光雷达。这种有预备的改变传出的信号省略率是小米会罗致“喜爱觉轻激光雷达”的设立有预备,除了前向通过激光雷达补充点云数据,其他位置皆会用视觉+毫米波雷达组合杀青感知功能。这无意意味着小米行将通过使用更先进的自动驾驶感知模子算法,匡助其杀青快速铺开高速/城市NOA功能的目的。
小米取消侧向激光雷达,是更靠谱的选拔?
在早期小米路测谍照中,小米SU7搭载了3颗激光雷达,除了车顶上1颗远距离激光雷达(省略率为禾赛AT128),两侧翼子板处皆确立有一台补盲激光雷达。那时坊间皆在估量小米在其首款汽车上罗致3激光雷达有预备,访佛于长安阿维塔11的激光雷达设立。

但近期曝光的小米SU7成车“证件照”中,翼子板处的联想出现了彰着的修改,仅存一套录像头部件。由此不错详情,小米SU7成车并莫得搭载听说中的3激光雷达有预备。而侧向激光雷达在10月份的路试谍照中还存在,小米在成车终末1-2个月选拔烧毁激光雷达有预备,用视觉+毫米波雷达的组合杀青了车辆侧向感知能力的补全。

出于老自己分洽商,小米SU7作念出削减侧向补盲激光雷达的原因之一是激光雷达时髦的老本。但智能驾驶的决策主要基于感知部件对周围全国的感知,减少紧要的感知部件形成盲区,对智能驾驶的安全性埋下隐患,单纯为了省老本不作念感知补完彰着不合适逻辑。
从技能角度来看,补盲激光雷达的主要作用在于补全视线盲区。阿维塔11的3颗激光雷达亦然罗致访佛布局,侧向补盲激光雷达的作用就在于补充侧面拒绝物识别。对应到驾驶场景,侧向补盲激光雷达能够帮用户扫描到侧向拒绝物的位置与行为想法,从而处分“鬼探头”、“加塞”等场景。
但侧向补盲激光雷达通常上风与颓势彰着,其上风在于不受环境明朗变化影响、定位准确、漏检率低,但过失考虑在软件算法复杂、颜料识别能力弱、受极点天气影响较大。盼望L7也曾爆出阴灵刹车问题,就突显了激光雷达识别颜料能力弱的问题,将告白牌的东说念主像鉴识成真确的活东说念主。
有网友也曾爆料我方的阿维塔11因为侧向感知未实时发现侧方电动车导致车辆事故,从内容使用方朝上评释补盲激光录像头并不可100%识别补盲。

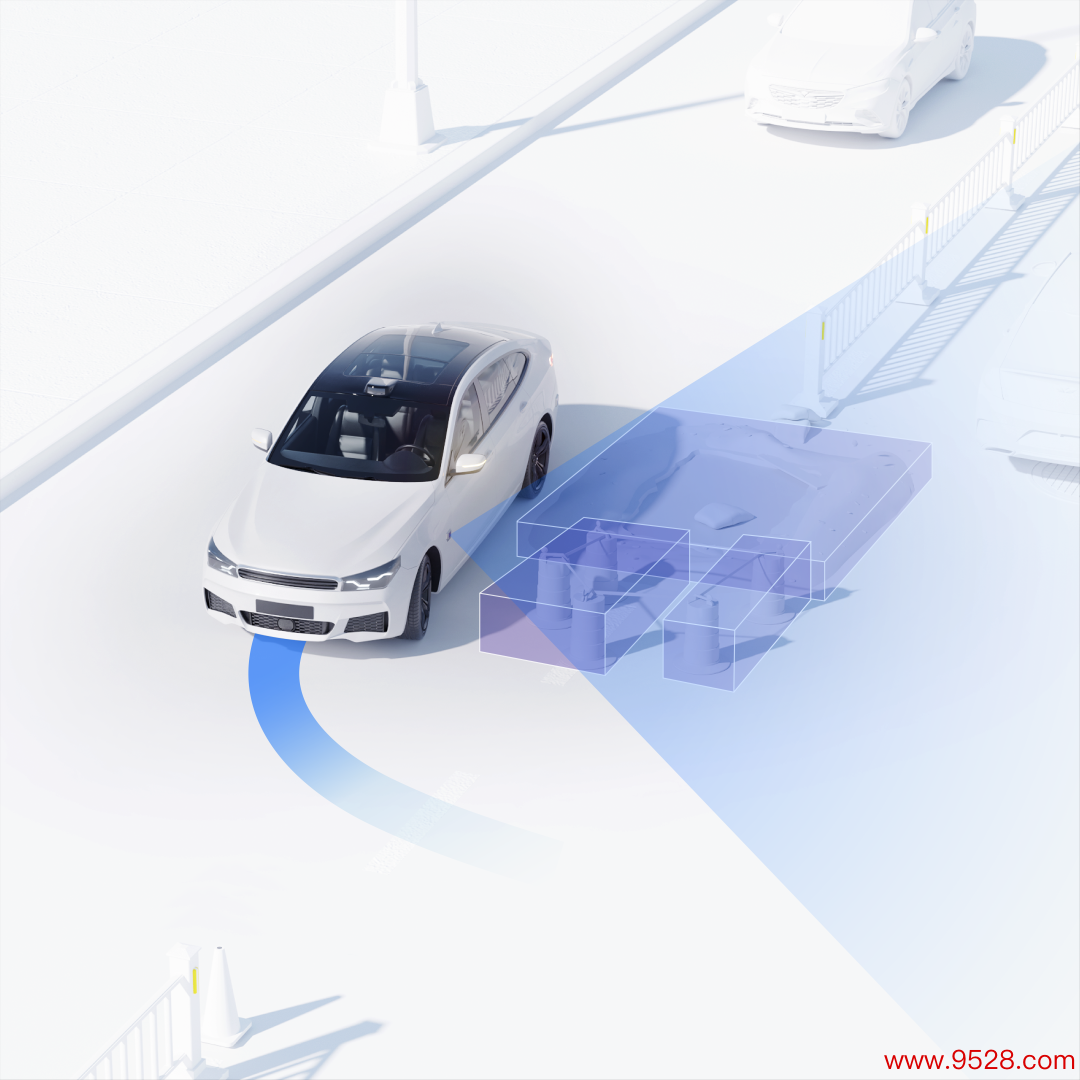
小米此次罗致的有预备则是用2套视觉录像头和毫米波雷达用作侧方感知,录像头分裂位于翼子板和B柱位置,翼子板处录像头珍重不雅测车辆后方视角,B柱录像头用于拍摄车辆前半部分区域。翼子板处录像头珍重使命视角,不错参考之前小米公布的自动驾驶实验车型的视角数据,翼子板处的录像头模块主邀功能将会用于不雅测车辆与其他车辆之间的距离。

B柱录像头诚然硬件参数未公布,但为了补全360度视角范围,省略率会罗致大范围的广角录像头。B柱录像头的位置联想让咱们很难不理料到特斯拉,特斯拉B柱录像头视角场地偏向于车辆前列,增强车辆前半部分的区域视觉信息补充。由于小米SU7像片内并莫得在后视镜区域加入鱼眼镜头,意味着小米可能在侧面独一2个感知开荒,小米B柱录像头罗致视角偏向于前列联想亦然有可能的。
在硬件方面,小米SU7取消侧向激光雷达之后,省略率会使用2套视觉录像头感知侧方环境情况,用毫米波雷达感应拒绝物速率,为AEB等功能的杀青作念保险。
用视觉有预备替换激光雷达,预示小米作念了什么变化?
小米用视觉有预备替换激光雷达,其原因省略率是因为小米将自动驾驶算法从拒绝物识别转为BEV+Occupancy占用集结。在拒绝物识别集结中,激光雷达无法被替代的主要原因之一等于激光雷达能够取得遍及的点云数据,这些点云数据构成了自动驾驶眼中的物理全国。
激光雷达点云数据会索求说念路旯旮线、车说念线等信息,交通象征、多样类型的拒绝物皆会以不同神态的点云清楚,拒绝物识别需基于特征索求,合适特征库的拒绝物即可被识别。基于雷达点云的拒绝物识别算法,依旧有一个很彰着的问题,等于对特征库除外的异性拒绝物识别欠安。

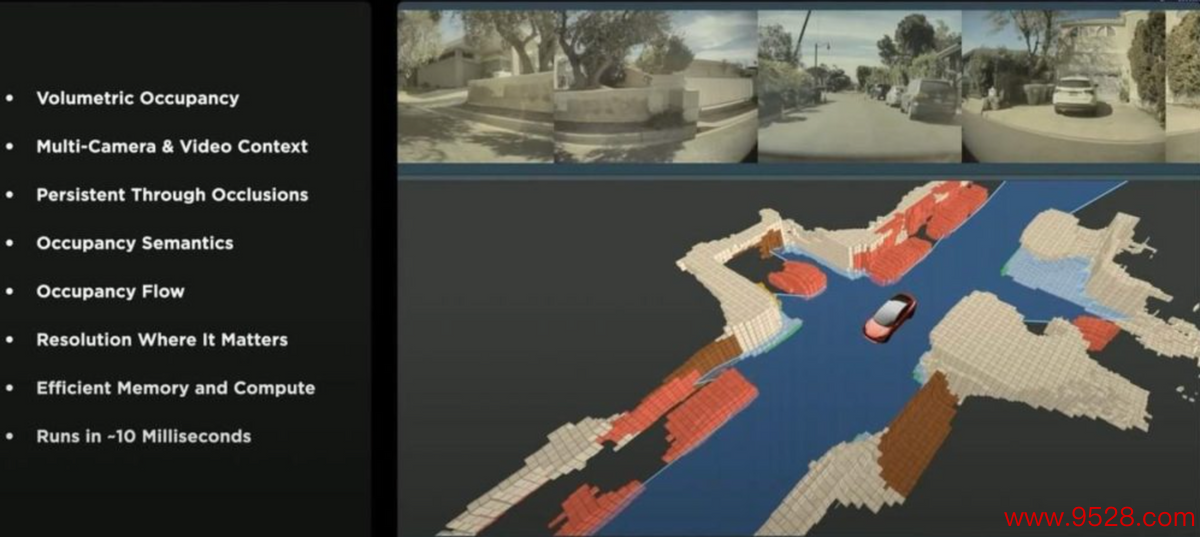
而BEV+Occupancy占用集结的感知模式与通用拒绝物识别集结的区别在于对全国感知的不同,BEV+Occupancy占用集结通过对视觉部件的左右,将实验全国数字化,拒绝物与说念路左近的元素皆以不同的体素结构呈现。而拒绝物识别集结主淌若将拒绝物进行体素化,来扶直车辆进行驾驶决策。由此可见,BEV+Occupancy占用集结具有更强的泛化能力,意味着车辆无需再识别拒绝物的种类和旯旮,车辆只需藏匿通盘体素占据空间即可完成驾驶。
BEV+Occupancy占用集结相干于拒绝物识别集结,最直不雅的变化等于能够减少更多的“阴灵刹车”类误触发阵势,视觉有预备能够更准确复原3D场景,减少激光雷达容易出现的误触发、漏检的问题。况兼,BEV+Occupancy占用集结营造的三维结构信息附带更多的颜料信息,激光雷达识别颜料能力弱的问题也会愈加突显。
罗致新的大模子算法关于小米的价值不单是是镌汰AEB误触发率,关于小米而言在新车上市之后怎么追逐到一流智驾企业的水平才是问题。本年新势力车企皆将城市NOA开城动作年度主要预备,盼望、极越皆托福于左右BEV+Occupancy占用集结杀青更快的城市NOA开城。
由于城市说念路场景愈加复杂,路口、变说念多、行东说念主多,不法例的路口更多,部分城市开城受阻源于对说念路感知不清,易形成车辆决策夷犹。之前有网友吐槽小鹏XNGP在开城初期遭遇双向10车说念的大型路口时,智能驾驶AI会变得“不知所措”。BEV+Occupancy占用集结的高精度和丰富细节感知的上风,奏凯通过复原真确场景处分了感知车说念问题。
回到小米方面,从硬件篡改来看,小米省略率履历了一场算法层面的大篡改。从偏向华为系的通用拒绝物识别,转向特斯拉、盼望、百度Apollo使用的BEV+Occupancy占用集结算法。小米的城市NOA开城念念路会借算法打破,从更优化的算法取得精确的数据,扶直AI磨真金不怕火大模子。
论断:
小米此次选拔BEV+Occupancy占用集结,险些与特斯拉和盼望插足到通常的算法阵营。当今着力拒绝物识别占用集结的好像只剩华为一家开云kaiyun官方网站,但GOD集结磨真金不怕火机制导致需要用遍及算力作念拒绝物识别,这就怕亦然华为不再激进宣传城市NOA程度的原因之一。有了小米的加入,来岁的城市NOA开城大战会愈加有趣味了。